| Front view | Back view | Inside view |
 |
 |
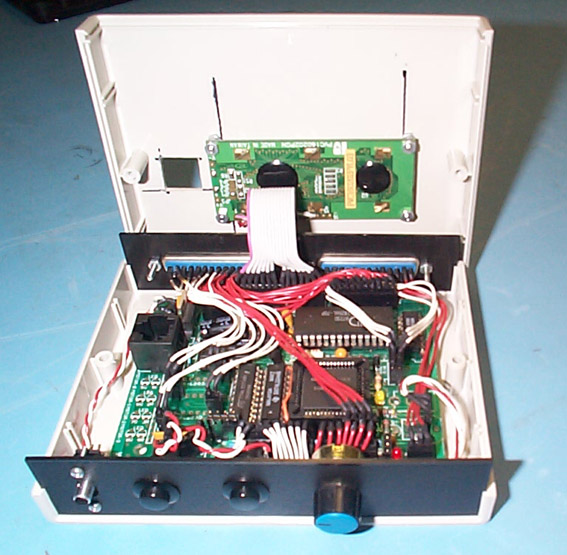 |
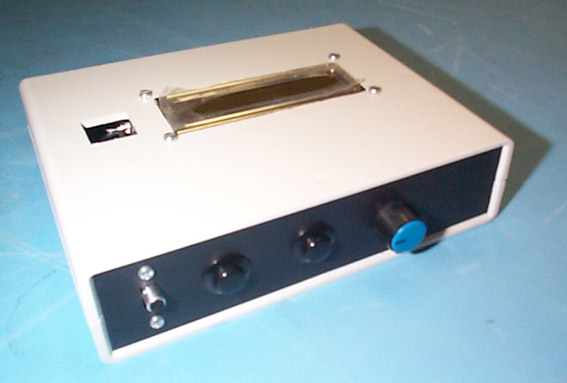
This controller is based on the Handy Board, designed by Fred Martin (MIT). The CPU is an 8 bit 2Mhz, Motorolla HC11, and is programmed in Interactive C. The CPU performs various built in functions such as digital input/output, analog input, pulse width modulated output (PWM) for motors and infrared input. The case is of rugged design, and provides the user with access to two multifunction buttons and a variable knob on the front, and a 16x2 LCD display, for viewing a range of information, on the top. The two DB25 connectors at the back provide an easy interface of all inputs and outputs from the CPU to any mobile robot platform. This allows one controller to be used in many platforms, with no rewiring required, only re-programming for each platforms specific task.
| Front view | Back view | Inside view |
|
|
|
Click on a photo above to enlarge it.